複数ロボット自然会話システムシステム(4)
複数ロボット自然会話システムシステム(1)
複数ロボット自然会話システムシステム(2)
複数ロボット自然会話システムシステム(3)
複数ロボット自然会話システムシステム(4)
ソフトウェア方式設計:
- 対談モード:
- 辞書
AA-u/d BA-u/d CA-u/d
AB-u/d BB-u/d CB-u/d
AC-u/d BC-u/d CC-u/d辞書フォーマット:
taidan={‘taidan’:{‘AA’:,u/d,message,’AB’:u/d,message,以下同様}}
AAは、パターンで辞書のキー、u/dは、アップ/ダウンモードで、uモードまたはdモードの二者択一とする。Messageは、会話文。
- ていだんモード:
- 辞書(参加ロボットが3人の場合)
ABC-A-u/d ACD-A-u/d BCD-B-u/d BAD-B-u/d
ABC-B-u/d ACD-C-u/d BCD-C-u/d BAD-A-u/d
ABC-C-u/d ACD-D-u/d BCD-D-u/d BAD-D-u/d辞書フォーマット:
teidan={‘teidan’:{‘ABC-A’:u/d,message,’ABC-B’:u/d,message,以下同様}}ABC-Aは、パターンで辞書のキー、u/dは、アップ/ダウンモードで、uモードまたはdモードの二者択一とする。Messageは、会話文。
- 辞書(参加ロボットが3人の場合)
- 会談モード:
- (1) 辞書(参加ロボットが4人の場合)
ABCD-A-u/d
ABCD-B-u/d
ABCD-C-u/d
ABCD-D-u/d辞書フォーマット:
kaidan={‘kaidan’:{‘ABCD-A’:u/d,message,’ABCD-B’:u/d,message,以下同様}}
ABCD-Aは、パターンで辞書のキー、u/dは、アップ/ダウンモードで、uモードまたはdモードの二者択一とする。Messageは、会話文。
- (1) 辞書(参加ロボットが4人の場合)
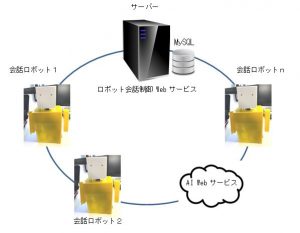
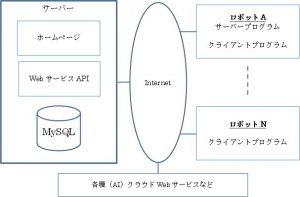
- サーバープログラムは、サーバーのMySQLデータベースからパラメータ情報をダウンロードして、辞書ファイルを初期化してサーバーへアップロードする。
- クライアントプログラムは、自分が所属するパターンのみサーバーからローカルにダウンロードして辞書を管理する。
- クライアントプログラムは、各パターンを参照して、u/dのアップロードモードのuモードがあれば、その会話文に対する応答文を生成して、関連するロボットへアップロードする。
- クライアントプログラムは、スレッドを立てて定期的にサーバーから辞書データをダウンロードして、投げ掛けられて会話文があるかチェックして、あればレスポンダーから応答文を得てサーバーに応答文をアップロードする。
- クライアントプログラムからアップロードされた会話文はMySQLデータベースに保存される。
- ていだんモードと会談モードは、同一処理となる。
- ていだんモードと会談モードは、会話文をアップしたロボットのu/dモードは、dモードに設定して、他のロボットのu/dモードは、uモードに設定する。
- 辞書
群馬プログラミングカレッジでは、種々のロボットを開発しています。
複数ロボット自然会話システム
このシステムに接続すると、ロボット同士の自然会話を行うことができます。
会話希望の方はご連絡ください。
WebサービスAPIのインターフェースを提供します。