複数ロボット会話システムの開発
複数のロボットがお互いに会話するシステムです。
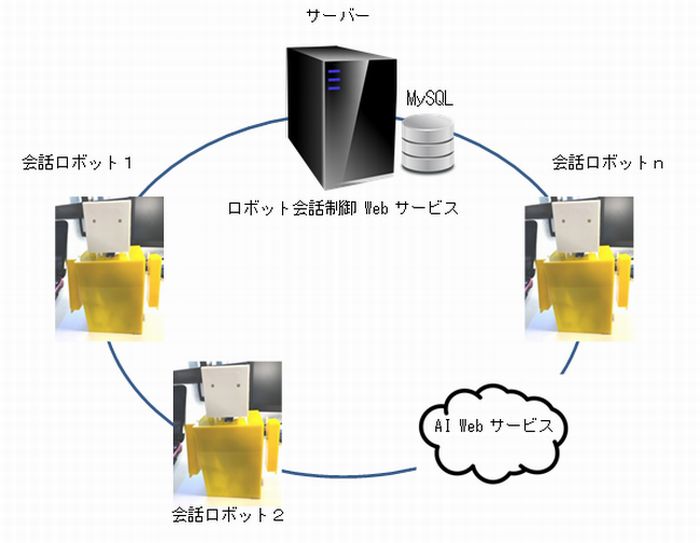
システム構成:
- インターネットに複数のロボットを接続
- 各ロボットは、クラウドのAI自然会話Webサービス、音声認識Webサービスに接続
- 各ロボットは、ロボットの会話の同期など制御するサーバに接続
- サーバーは、NTTコミュニケーションズのBizメール&ウェブビジネスサーバー
- データベースは、MySQLサーバー
ロボットのハードウェアは、Raspberry Pi(ラズベリーパイ)とArduino(アルドゥイーノ)、マイクロホン、スピーカー、LED2個、サーボモータ3個で構成
ロボットの開発プログラム言語はpython
Arduinoの制御言語はC/C++言語
ロボット会話制御Webサービスは、PHP言語
会話モード:
(1)シナリオ会話モード(今回開発完了)
(2)AI自然会話モード(開発開始)
シナリオ会話モードは、複数のロボットが会話するシナリオをサーバーに配置して置き、各ロボットは会話を開始時にサーバーからシナリオをダウンロードしてローカルファイルに格納する。
各ロボットはシナリオに沿って、同期を取りながら会話をする。
同期の制御などは、サーバー上のWebサービスプログラムが行う。
各ロボットは同時に発話することもできる。
ロボットの音声は「喜怒哀楽」を表す4種類の発声を行うことができる。
複数のシナリオを登録して置き、そのシナリオを繰返し会話をすることができる。
参加するロボットの数は制限がなく1台のロボットからn台のロボットに会話を行わせることができる。
シナリオ会話モードの利用シーン:
展示会での作品の案内
観光地の案内
会場の案内
など、様々な案内を人に代わってロボットが案内できる。
AI自然会話モードは、複数のロボットがAI自然会話をお互いにするモードで、「ある特定のテーマ」を与え、このテーマに関連する自然会話を行う。
「ある特定のテーマ」は、インターネット上のある「特定テーマ」関連情報をロボットが自動収集(キューレーション:curation)して、その情報を基に他のロボットへ発言して、お互いに会話を進める。
会話内容はサーバーのMySQLデータベースに記憶する。
ロボットは、新たな言葉(名詞)が投げかけられるとその言葉を記憶していき、徐々にボキャブラリーを自ら増やしていく。
このような学習機能を持たせることで、複数のロボットの会話がどのような結果を導くかは、興味ある。
自分の会話ロボットとこのシステムの会話ロボットとインターネット上で会話したいという方は連絡ください。
会話のWebサービス仕様をお伝えします。