案内Robotのシステム構成
Raspberry Pi(ラズパイ)、Arduino(アルディーノ)で実現する案内Robotのシステム構成です。
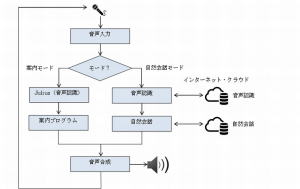
- マイクロホンでの音声入力
- AIクラウドを利用した音声認識
- Juliusの音声認識ローカルソフト
- AIクラウドを利用した自然会話
- 案内プログラム
- Open JTalkでの音声合成
- Arduinoでの手(サーボモーター)、目(LED)の制御
の機能を有します。
Raspberry Piでの開発プログラミング言語は、Pythonです。
Arduino は、C/C++言語です。
音声認識は、自然会話モード時は、クラウドを利用します。
非自然会話モード時は、Juliusを利用します。
今後、このRobotのプログラミング記事を掲載します。この案内Robotのシステム構成です。
案内Robotの制御部は、ぬいぐるみなどに内蔵してヘッドセットマイクやピンマイクなどを用いて案内をします。
案内場所は、色々な場所に対応できるように、案内辞書を作成できます。